空间的六个自由度是怎么规定?
的有关信息介绍如下:物体在空间具有六个自由度,即沿x、y、z三个直角坐标轴方向的移动自由度和绕这三个坐标轴的转动自由度 。因此,要完全确定物体的位置,就必须清楚这六个自由度。
依据特定的轨迹完成平台在空间六个自由度(X、Y、Z、α、β、γ)的运动,从而可以模拟出各种空间运动姿态。
扩展资料
相关应用:
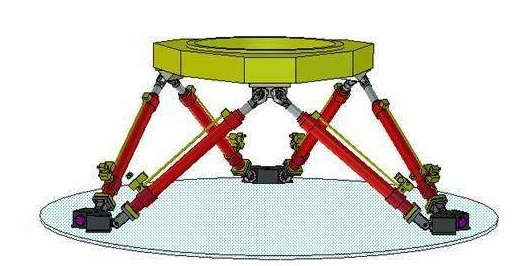
六自由度并联机器人的结构由上下两个平台,中间6个伸缩缸以及上下各6个虎克铰(或球铰)组成6-6形机构,称为Stewart平台。
其中下平台固定,下平台与上平台通过6个伸缩缸及虎克铰连接,虎克铰或球铰位于上平台与6个伸缩缸的连接处,对保证平台的正常运行和整个结构刚度起着关键作用。借助伸缩缸的伸缩来实现上平台沿X、Y、Z的平移和绕X、Y、Z轴的旋转运动。
一般伸缩缸由伺服电动缸或液压缸组成(大吨位的采用液压缸的形式)如下图2所示。借助六个伸缩缸的伸缩运动,完成上平台在空间六个自由度(X,Y,Z,α,β,γ)的运动,从而可以模拟出各种空间运动姿态。
因此可广泛应用到各种训练模拟器中,如飞行模拟器、汽车驾驶模拟器、地震模拟器、卫星、导弹等飞行器、娱乐设备(动感电影摇摆台)等领域中。在加工业可制成六轴联动机床、机器人等。
参考资料来源:百度百科-六自由度